
































永宏plc在杯子制造机械手方面的plc控制系统
1、行业介绍
一次性塑料杯碗在20世纪70年代末开始广泛传播,随着其使用方便、卫生保健等特点,永宏plc在餐饮业中的地位越来越重要。目前,塑料杯、碗广泛应用于饮料店、冷热饮料店、茶店、宾馆、饭店、咖啡店等,为外卖饮料和现场使用提供各种塑料杯。
随着我国经济的不断发展和科学技术的迅速发展,该设备广泛应用于一次性塑料杯的自动制杯操作。可从一次性塑料杯成型机中快速取出并堆叠至设定的编号。提高生产效率,节约劳动成本,降低劳动强度,改善生产环境。
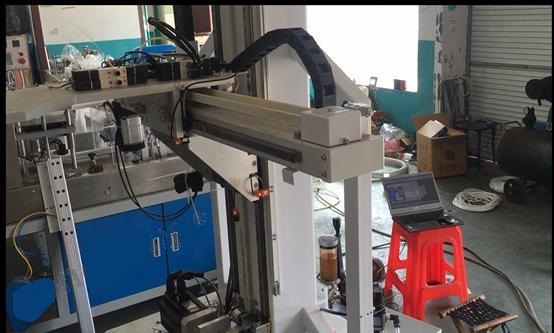
工作原理:拔罐机带杯机器人通过伺服电机执行XY轴控制臂进入成型机模具,通过真空发生器吸塑料杯,将其取出并堆放在输送机上皮带通过设定参数,并通过传送带,转移到包装机进行包装。

2、系统设计方案
2.1计划背景
拔罐机是根据传统的手动拾取和堆叠塑料杯开发的全自动杯堆叠装置。与堆叠杯的手动操作相比,自动拔罐机器人更快,堆叠精度更高。没有人工接触更卫生。自动拔罐机采用机器人控制,采用plc制系统。 PLC不仅可以满足客户的控制要求,而且具有良好的系统稳定性和高机动性。本文在拔罐机在制杯机中的应用背景下,详细描述和介绍了永红PLC的硬件设计,软件设计和实现结果(应用效果)。
2.2客户需求
根据机械结构和工艺要求,客户具有以下功能。首先,它可以手动控制步进电机,气缸等。有模拟启动和单独停止功能。 HMI显示当前机器人运行状态和主机的当前角度显示。总而言之,制杯机的拔罐机需要很好地满足各种控制要求,并且还需要达到各种工艺要求。
3、硬件配置
机器人制杯机需要控制2个伺服电机、1个变频器和多个气缸,因此,一台永宏plc FBs-40MCT2用作整个设备的plc控制系统;一个FBs-B2DA(模拟板)用于控制PLC到变频器的频率;上位机使用HMI触摸屏界面进行数据监控和参数设置。 。运动控制使用伺服驱动器和电机,逆变器和电机;其他执行器使用气缸,普通电机等;检测单元使用编码器和接近开关,整个配置解决方案可以帮助客户节省大量系统成本,整个配置解决方案可以帮助客户节省大量系统成本。

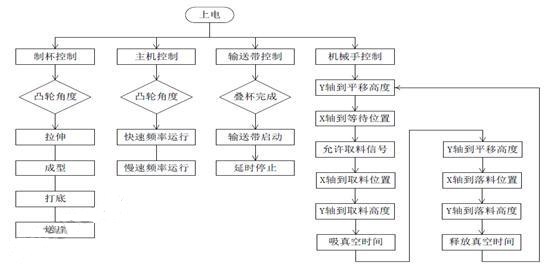
4、工艺流程
拔罐机拔罐机器人的过程主要分为四个过程:机器人控制,输送带控制,主机控制和杯控制,还有具有报警功能。
机器人控制:XY轴伺服电机执行杯形拔罐动作。
传送带控制:转移堆叠的塑料杯。
永宏plc控制:控制变频器的启动、停止和控制频率增加和减少。
结论
永宏plc通过现场调试,拔罐机器人组装机具有结构简单,操作简单,维护方便,生产效率高,生产质量高的优点。设备的运行效率为2-3s /板,设备运行期间运行。稳定,生产效率高;它可以提高生产效率,降低劳动强度,节省劳动力成本,改善客户的生产环境。该装置已广泛应用于一次性塑料杯领域,具有速度快,精度高,稳定性高,适用性强等特点,已得到越来越多客户的认可。
标题:永宏plc在杯子制造机械手方面的plc控制系统 地址:http://www.ronggan.net/gongsi/3494.html



和MMC卡6ES7953-8LF11-0AA0的用途")







